Research on Mind-Machine Interface Technology
Research Focus: Hybrid Brain-Machine Interface, Cognitive Neuroscience, Neural Signal Processing, Artificial Intelligence, and Neuro-Virtual Interface System
Current Projects
[1] Neuro-Virtual Interface System to Understand Cognitive Performance of Human Brain - Funded by Kansas NASA EPSCoR Seed Research Initiation Grant (May 2019) PI: Dr. Jaydip Desai, Co-PI: Dr. James Steck and Dr. Yimesker Yihun, Collaborators: NASA Johnson Space Center and BRIJ Systems LLC - Approved IRB
Approved IRB Number: 4460
- This funded KS NASA EPSCoR project recruited and tested ten participants' human brain responses during simulated space conditions related to Earth, Mars, and International Space Station (ISS). Each participant's body weight distributed according to Earth, Mars, and ISS scenarios where their imaginary movements using designed neuro-virtual interface system recorded. Study results showed that human brain responses decreases from Earth to Mars to ISS. There is a need to effectively calculate cognitinve performance of astroanuts brain using hybird brainc-omputer interface system that can be used to train future astronauts.


Accepted for Publication
- Parshuram Aarotale and Jaydip Desai, "Effect of Simulated Space Conditions on Functional Connectivity", Biomedical Sciences Instrumentation Journal.
Relevant Publications
- Jordan Clark*, "Neuro-Virtual Interface System to Understand Human Brain Responses
in Simulated Space Conditions," IEEE Wichita Section and IEEE Region 5 North Area
Student Poster Contest, Jan and Mar 2021 respectively. (Undergraduate Research Mentor:
Dr. Jaydip Desai)
- Jordan Clark secured first place in IEEE Wichita Section and second place in IEEE Region 5 North Area competition.
- Ashley Stroh*, Jordan Clark*, Sai Tarun Bandemegala, and Jaydip Desai, "Understanding Human Brain Responses during Motor IMagery Tasks in Simulated Space Conditions" - on-Demand Presentation, 2020 Biomedical Engineering Society (BMES) Annual Meeting, Oct 2020, San Diego, CA
- Jesus Gomez, Zayed Alsalem*, Yrithu Thulassedharan, Jaydip Desai,and James Steck, "P300 Speller based Brain-Machine Interface Technology to Effectively Maneuver a Quadcopter in 3D Space" - Poster Presentation, 2020 Biomedical Engineering Society (BMES) Annual Meeting, Oct 2020, San Diego, CA
- Mousa Moradi, Adam Reust, Jaydip Desai, "Design and Development of a Functional Near Infrared Spectroscopy based Brain Mapping Graphical User Interface", Biomedical Sciences Instrumentation, Vol. 56(2), Apr 2020, ISSN: 1938-1158 04 56 2, ISBN: 978-1-989527-04-07
- Ashley Stroh*, "Evaluating Astronauts' Cognitive Performance in Space using Hybrid Brina-Machine Interfac System," Undergraduate Research Day at the Capital, Topeka, KS, Feb 2020 (Undergraduate Research Mentor: Dr. Jaydip Desai)
[2] Neural Decoding and Control of Assistive Robotic Limb using EEG Signals - Funded by URCA Award from WSU (June 2019) PI: Dr. Jaydip Desai
Approved IRB Number: 4513
Work in progress
Neuro-Robotics Lab trained artificial neural network to extract six motor imagery features using EEG signals from human brain. This video shows offline testing of a trained artificial neural network to successfully manipulate six degrees of freedom virtual robotic arm using inverse kinematics by recorded motor imagery signals from human subject. Neuro-Robotics Lab is working towards online testing of the designed artificial neural network with 6 DOF robotic arm.
[3] Design and Development of fNIRS-based Brain Mapping Algorithms - Funded by Industry (Aug 2019) PI: Dr. Jaydip Desai
Work in progress
Testing Current fNIRS System for Oxy- and Deoxy-Hemoglobin Concentration
Relevant Publications
- Mousa Moradi, Adam Reust, Jaydip Desai, "Design and Development of a Functional N ear Infrared Spectroscopy based Brain Mapping Graphical User Interface",Biomedical Sciences Instrumentation Journal, Vol. 56(2), Apr 2020, ISSN: 1938-1158 04 56 2, ISBN: 978-1-989527-04-07
- Mousa Moradi and Jaydip Desai, "High Temporal Resolution PGA-based Functional Near-Infrared Spectroscopy for Neuroimaging Studies" - Poster Presentation, 2020 Biomedical Engineering Society (BMES) Annual Meeting, Oct 2020, San Diego, CA
Past projects
[1] Deep Learning Neural Network to Identify Changes Associated with Motor Imagery Signals from Human Brain
IRB Number: 4063, PI: Dr. Jaydip Desai, Co-I: Adam Reust
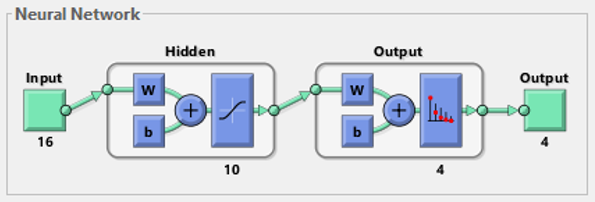
This project aimed to develop a real time BMI model based on motor imagery signals from human brain. The study was approved by the Institutional Review Board (IRB) at Wichita State University. Scaled Conjugate Gradient, Bayesian Regularization and Levenberg-Marquardt networks were trained during actual and imagery movements of human hand. The project utilized 16 channel wired gtec EEG system to conduct neuroscience study associated with motor cortex region of the human brain. Three EEG electrodes were used for feedforward pattern recognition neural network algorithm and sixteen features were calculated during EEG signal recording. The research team has acquired overall 95% accuracy.
Relevant Publications
- Adam Reust, Jaydip Desai, Louis Gomez*, "Extracting Motor Imagery Features to Control Two Robotic Hands" IEEE International Symposium on Signal Processing and Information Technology (ISSPIT) 2018, Louisville, KY
[2] Motor Imagery based Brain-Machine Interface Technology to Control Two Robotic Hands
Brain-Machine Interface (BMI) model was developed in the lab to control two Mecha TE Robotic Hands in real-time using motor imagery signals from human brain. This noninvasive BMI technology shows the potential to control multiple robotic devices to assist person with spinal cord injury.
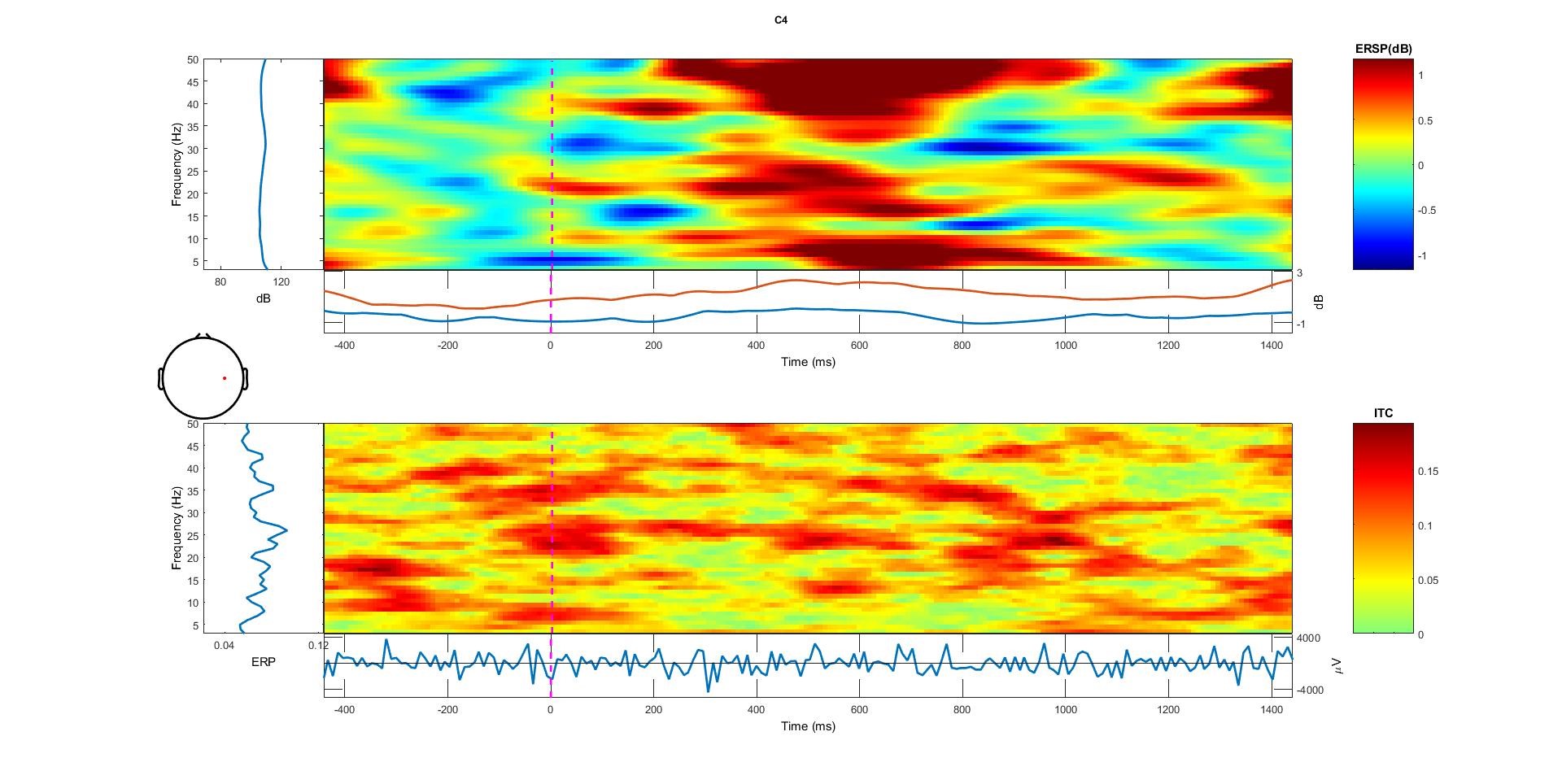
(a) Actual Movement - Left Hand (shows higher beta wave activity)

(b) Imaginary Movement - Left Hand (shows higher alpha wave activity)
Experimental Testing using Two Robotic Hands
Relevant Publications
- Adam Reust, Jaydip Desai, Louis Gomez*, "Extracting Motor Imagery Features to Control Two Robotic Hands" IEEE International Symposium on Signal Processing and Information Technology (ISSPIT) 2018, Louisville, KY
- Adam Reust, Jaydip Desai, "Implementation of Artifical Neural Network to Classify Motor Imaginary Signals for Two Robotic Hands", Oral Presentation in Neural Decoding and Control Session, 2018 BMES Annual Meeting
- Louis Gomez*worked on neural network training on motor imaginary signals in this project won the first place in Undergraduate Student Paper Competition, IEEE Region 5 Annual Conference, Apr 6-8, 2018 at Austin, TX
- Kline, A.*, Desai, J.(2015), “ Noninvasive Brain-Machine Interface to Control Both Mecha TE Robotic Hands Using Emotiv EEG Neuroheadset”, International Journal of Biomedical and Biological Engineering, Vol.9, No.4, 2015, 323-327
Two-Dimensional control using motor imaginary signals from human brain
Understanding P300 Signals using Electroencephalography
P300 for Brain-Machine Interface is being tested in the lab.
[3] EEG-based Robotic Hand Control in Real-Time
The Emotiv™ electroencephalogram (EEG) headset is a non-invasive brain-computer interface with 14 EEG channels that was used to record neural responses to stimuli in 5 male and 5 female participants. The stimuli included instructions (presented in both visual or auditory format successively) of ‘right’ or ‘left.’ Participants raised their right or left arm in response to the instruction given. The subjects were stimulated and their data was recorded using a scenario generated in OpenViBE™. Specifically, the Graz Motor BCI Stimulator algorithm was used to generate the number and frequency of auditory and visual stimulations. In addition, using EEGlab™ in conjunction with Matlab® , the electrodes most important during visual and auditory stimulation were identified. This aided in the development of processing real-time EEG signals from the Emotiv™ EEG headset. Filtering and feature extraction were accomplished via the SIMULINK® signal processing toolbox. An Arduino™ microcontroller acted as a connection between the Mecha Te Hand™ and the Emotiv™ EEG headset.

Relevant Publications
- Adrienne Kline*, Jaydip Desai," Simulink Based Robotic Hand Control using Emotiv EEG Headset," 2014 40th Annual Northeast Bioengineering Conference (NEBEC), IEEE Conference Paper, Apr 25-27, 2014
Research on Artificial Intelligence based Smart Assistive and Rehabilitative Robotic Devices
Research Focus: Hybrid Human-Machine Interface, Artificial Intelligence, Rehabilitation Robotics, Soft-Robotics, Human-Centered Design, Assistive Technology, and Biosignal Processing
Current Projects
[1] Bioinspired Exoskeletons for Rehabilitation - Funded by NSF (July 2019) PI: Dr. Yimesker Yihun, Co-PI: Dr. Jaydip Desai and Dr. Nils Hakansson, Collaborators: Cerebral Palsy Research Foundation - IRB Approved Study
Overall goal for this NSF funded project is to design bioinspired exoskeleton for upper arm rehabilitation and evaluate the effect on muscles while using joint to joint and bioinspired upper arm exoskeletons in collaboration with Cerebral Palsy Research Foundation.
Relevant Publications
- Pablo Delgado, Sajja Alekhya, Amirhossein Majidirad, Nils Hakansson, Jaydip Desai, and Yimesker Yihun, "Shoulder Kinematics Assessment Towards Exoskeleton Development", Applied Sciences, Special Issue on Robotic and Sensor Technology for Upper Limb Rehabilitation, MDPI, Vol. 10(18), Sep 2020
[2] Development of a Soft-Robotic Glove for Hand Rehabilitation
We have designed a soft-robotic glove that uses an air to provide repetitive task therapy for hand rehabilitation. Our designed prototype is light weight and uses intelligent algorithms to automatically control the rehabilitative glove for rehabilitation while ensuring user's safety.
In-Review
- Claire Rieger, and Jaydip Desai, "A Preliminary Study to Design and Evaluate Pneumatically Actuated Soft Roobtic Actuators for Repetitive Hand Rehabilitation Task," Biomimetics, MDPI
Relevant Publications
- Fadi Gerges, Jaydip Desai, " Design of a Low Pressure Pneumatic ally Actuated Soft Robotic Glove for Stroke Rehabilitation", Vol. 56(2), Apr 2020, ISSN: 1938-1158 04 56 2, ISBN: 978-1-989527-04-07, Biomedical Sciences Instrumentation Journal, Apr 2020
- Fadi Gerges,Jaydip Desai, John Watkins, and Sindhu Preetham Burugupally, "Development of a Soft Robotic Glove Control System to Facilitate Hand Rehabilitation After Stroke" - accepted for an on-demand presentation, 2020 Biomedical Engineering Society (BMES) Annual Meeting, Oct 2020, San Diego, CA
- Fadi Gerges, Jaydip Desai, John Watkins, and Sindhu Preetham Burugupally, "Master-Slave Control for a Pneumatically Actuated Low Pressure Soft Robotic Glove to Facilitate Bilateral Training for Stroke Patients" - 6-page IEEE format paper accepted for an oral presentation, 23rd International Symposium on Measurement and Control in Robotics, Oct 15-17, 2020, Budapest, Hungary https://ieeexplore.ieee.org/document/9263764
[3] Evaluating Passive Exoskeletons - Project Funded by Spirit AeroSystems (Aug 2019) PI: Dr. Jaydip Desai, Co-PI: Dr. Nils Hakansson and Dr. Michael Jorgensen, Industry Partner: Spirit AeroSystems - IRB Approved Study
This industry funded project aimed to evaluate different passive shoulder exoskeletons for overhead tasks using motion capture system and electromyography.
In-Review
- Michael Jorgensen, Nils Hakansson, and Jaydip Desai, "The Influence of Passive Shoulder Exoskeleton Maximum Support Angle Settings on Shoulder and Torso Muscle Activity during Simulated Drilling Tasks, International Journal of Occupational Safety and Ergonomics (JOSE), Taylor & Francis
Relevant Publication
- Michael Jorgensen, Nils Hakansson, and Jaydip Desai, “The Impact of Passive Shoulder Exoskeletons during Simulated Aircraft Manufacturing Sealing Tasks”, International Journal of Industrial Ergonomics, Elsevier, Vol. 91, July 2022 https://www.sciencedirect.com/science/article/pii/S0169814122000786?via%3Dihub
- Michael Jorgensen, Nils Hakansson, and Jaydip Desai,"I nfluence of Different Passive Shoulder Exoskeletons on Shoulder and Torso Muscle Activation during Simulated Horizontal and Vertical Aircraft Squeeze Riveting Tasks", Applied Ergonomics, Elsevier, Vol. 104, June 2022 https://www.sciencedirect.com/science/article/pii/S0003687022001454?dgcid=coauthor
- Michael Jorgensen, Nils Hakansson, Jaydip Desai, Andrea Martinez, Michael Nguyen, and Trevor Owen, " The Effect of Passive Shoulder Exoskeletons on Shoulder and Torso Muscle Electromyographic Activity During Simulated Overhead Drilling Tasks", The XXXIII rdAnnual Occupational Ergonomics and Safety Conference, Virtual Conference, Sep 16-17, 2021
- Nils Hakansson, Michael Jorgensen, Jaydip Desai, Aaron Hodson, and Trent Madden, "Range of Motion from Four Passive Shoulder Exoskeleton", The XXXIII rdAnnual Occupational Ergonomics and Safety Conference, Virtual Conference, Sep 16-17, 2021
Past Projects
[1] Hand Gesture Controlled Artificial Intelligence-based Wheelchair Mounted Upper Limb Robotic Exoskeleton for Daily Activities - Approved IRB
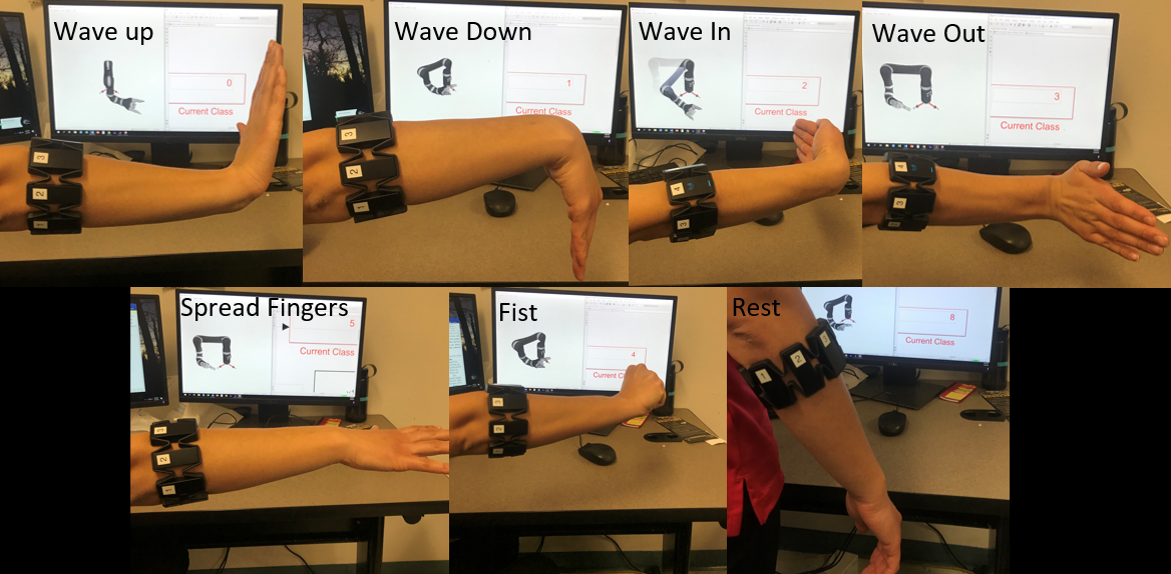
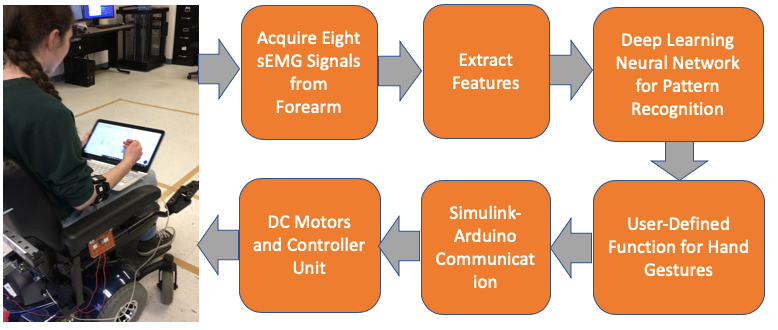
This project proposed an adaptive controller that uses sEMG signals from human forearm with artificial neural network trained classifier to identify seven gestures to manipulate a wheelchair-mounted upper limb robotic exoskeleton for activities of daily living.
Relevant Publication
- Bridget Schabron, Jaydip Desai, and Yimesker Yihun, "Wheelchair-Mounted Upper Limb Robotic Exoskeleton with Adaptive Controller for Activities of Daily Living", Sensors, MDPI - accepted on Aug 23, 2021
[2] Continuous Control of a 6 DOF Assistive Virtual Robotic Limb using Artificial Neural Network based Human Hand Gesture Recognition
Myoelectric signals were extracted from forearm muscles to identify hand gestures followed by a real-time virtual assistive robotic arm control.
Identify Human-Hand Gestures to Control an Assistive Robotic Limb
Relevant Publications
- Mousa Moradi, Sandra Dang, Zayed Alsalem, Alejandro Palacios, and Jaydip Desai, " ntegrating Human Hand Gestures with Vision-Based Feedback Controller to Navigate a Virtual Robotic Arm" - 6-Page IEEE format paper, 23rd International Symposium on Measurement and Control in Robotics, Oct 15-17, 2020, Budapest, Hungary https://ieeexplore.ieee.org/document/9263771
- Bridget Schabron, Zaid Alashqar*, Nicole Fuhrman*, Khaled Jibbe*, and Jaydip Desai, "Artificial Neural Network to Detect Human Hand Gestures for a Robotic Arm Control" 4-page IEEE format paper, 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany July 23-27, 2019 https://ieeexplore.ieee.org/document/8857264
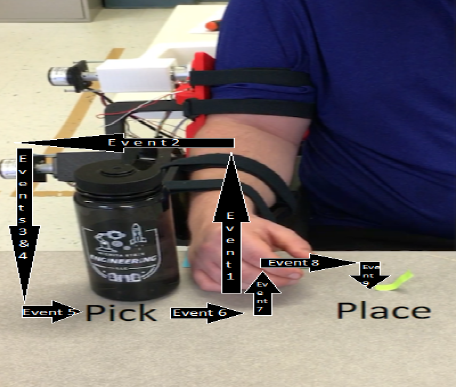
[3] Integration of Forearm sEMG Signals with IMU Sensors for Trajectory Planning and Control of an Assistive Robotic Limb


(a) relax, (b) fist, (c) spread, (d) wave in, and (e) wave out
Relevant Publications
- Bridget Schabron, Adam Reust, Jaydip Desai, and Yimesker Yihun, "Integration of Forearm sEMG Signals with IMU Sensors for Trajectory Planning and Control of Assistive Robotic Arm" 4-page IEEE format paper, 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany July 23-27, 2019 https://ieeexplore.ieee.org/document/8856699
[4] Hybrid Human-Machine Interface Technology to Navigate a Powered Wheelchair - Approved IRB
PI: Dr. Jaydip Desai, Co-I: Anne Dowling and Ashley Stroh
Relevant Publications
- Ashley Stroh and Jaydip Desai, "Hand Gesture Based Artificial Neural Network Trained Hybrid Human-Machine Interface System to Navigate a Powered Wheelchair, Journal of Bionic Engineering, Springer, Issue 5, Sep 2021
- Ashley Stroh*, Jaydip Desai,"Hybrid Human-Machine Interface to Ensure Human Safety During Powered Wheelchair Control" Device Technologies and Biomedical Robotics Track at 2019 Biomedical Engineering Society Annual Meeting, Oct 16-19, 2019, Philadelphia, PA
- Ashley Stroh*, Jaydip Desai, "Human-Centered Deep Learning Neural Network Trained Myoelectric Controller for
a Power Wheelchair" 4-page IEEE format paper, International Symposium on Measurement
and Control in Robotics (ISMCR 2019), Sep 19-21, 2019, Houston, TX
- Oral presentation in Robotics for Human Performance and Rehabilitation and Medical Applications II Track on Sep 21, 2019
- https://ieeexplore.ieee.org/document/8955734
[5] Force Myography Controlled Intelligent Assistive Wheelchair-Mounted Robotic Exoskeleton - Approved IRB
PI: Dr. Jaydip Desai, Co-I: Bridget Schabron
Relevant Publications
- Jaydip Desai, Bridget Schabron, Yimesker Yihun, "Force Myography Controlled Intelligent Assistive
Wheelchair-Mounted Robotic Exoskeleton for Arm Movements"" 5-page IEEE format paper,
International Symposium on Measurement and Control in Robotics (ISMCR 2019), Sep 19-21,
2019, Houston, TX
- Oral presentation in Robotics for Human Performance and Rehabilitation and Medical Applications II Track on Sep 21, 2019
- https://ieeexplore.ieee.org/document/8955711
[6] Design and Development of a Wheelchair-Mounted Upper Limb Robotic Exoskeleton - Approved IRB
NRL lab has designed its first prototype of the smart assistive upper arm exoskeleton. This prototype is currently being tested with innovative controller mechanism.
PI: Dr. Jaydip Desai, Co-I: Bridget Schabron
Relevant Publications/Presentations
- Bridget Schabron, Jaydip Desai, and Yogesh Parikh, "Design of a Rapid-Prototyped Smart Robotic Exoskeleton for Power Wheelchair Users" Biomedical Sciences Instrumentation Journal, 55(2), 416-421
- Bridget Schabron, Jaydip Desai, "Development of a Wheelchair-Mounted Robotic Exoskeleton to Assist Person with Upper Limb Movement Disability", Oral Presentation in Prosthetics and Exoskeletons Session, 2018 BMES Annual Meeting, Oct 17-20, 201
[7] Design of a Novel Single Actuator Differential Mechanism for a Prosthetic Hand
NRL has designed an innovative differential mechanism to control all fingers of the prosthetic hand using a single actuator.
Relevant Publications
- Fadi Gerges*, and Jaydip Desai, "A Novel Design of a Single Actuator Differential Mechanism to Control a Prosthetic Hand" Biomedical Sciences Instrumentation Journal, 55(2), 330-335
- Fadi Gerges*, Jaydip Desai, "Design of a Single Actuator Differential Mechanism for a Prosthetic Hand", Oral Presentation in Prosthetics and Exoskeletons Session, 2018 BMES Annual Meeting, Oct 17-20, 2018
[8] Artificial Neural Network to Control an Individual Finger Movement of a Robotic Hand - Approved IRB
PI: Dr. Jaydip Desai, Co-I: Anne Dowling and Ashley Stroh
NRL has designed real-time neural network based control algorithms for an individual finger movement of a robotic hand using surface electromyography signals from human forearm.
Relevant Publications
- Anne Dowling*, Jaydip Desai, "Artificial Neural Network to Classify Human Forearm Muscle Signals for Individual Finger Movement of a Robotic Hand", Poster Presentation in Device Technologies and Biomedical Robotics, Research Experiences for Undergraduates at 2018 BMES Annual Meeting, Oct 17-20, 2018
Collaborative Research
Assist as Needed Control for Knee Rehabilitation
Collaborative work with Dr. Yimesker Yihun from Mechanical Engineering
Simulation of Exoskeleton Alignment
Collaborative work with Dr. Yimesker Yihun from Mechanical Engineering and Dr. Nils Hakansson from Biomedical Engineering
Brain-Machine Interface for Quadcopter Control
Collaborative work with Dr. James Steck from Aerospace Engineering
IRB Number: 4571, PI: Dr. Jaydip Desai, Co-I: Jesus Gomez, Zayed Alsalem, Daniel Ulichnie
- Implementation of real-time neuro-robotic control algorithms for a Quadcopter
- Jesus Gomez, Graduate Student of Aerospace Engineering (Advisor - Dr. James Steck), is working with Adam Reust, Graduate Student of Biomedical Engineering (Advisor - Dr. Jaydip Desai), to integrate real-time control algorithms for a Quadcopter using motor imagery signals from human brain.
Testing Quadcopter Stability
Testing Quadcopter Manual Control
P300-based Quadcopter Control
Relevant Publications
- Jesus Gomez, Zayed Alsalem*, Yrithu Thulassedharan, Jaydip Desai, and James Steck, "P300 Speller based Brain-Machine Interface Technology to Effectively Maneuver a Quadcopter in 3D Space" - accepted for a poster presentation, 2020 Biomedical Engineering Society (BMES) Annual Meeting, Oct 2020, San Diego, CA
* denotes undergraduate student